I have new animation kits now available. Now you can add the kit plus servos (not included) and animate your pilot. Or you can
add a controller board and program your pilot to move independendly.
The controller (item 1350 from www.pololu.com) can be programmed
with software you can download and program yourself. You will need 2 - HXT500 Micro Servo 0.8kg / 0.07sec / 6.2g for the head to pan and tilt from Hobby
King and if you want the arm or arms to move you will need 1 or Turnigy™ TGY-50090M Analog Servo 20T MG 1.6kg / 0.08sec / 9g also from Hobby King. It is easy
to do yourself, just swap out the upper torso from the pilot with the animation upper torso with servos installed! (instructions included)
NB Shoulder servos must be 9 gram metal
gear!
I used 5 gram nylon gear at first, I either burned them or ripped the gears
Actual
setup is
- Head movements 2 x Hobbyking HXT 500 https://hobbyking.com/en_us/hxt500-micro-servo-0-6kg-0-08sec-6-2g.html?___store=en_us
- Shoulder/arm movements, 1 on each side https://hobbyking.com/en_us/turnigytm-tgy-50090m-analog-servo-mg-1-6kg-0-08sec-9g.html
- Forearm movements, 1 on each side https://hobbyking.com/en_us/turnigytm-tgy-d56mg-coreless-ds-mg-hv-servo-1-2kg-0-10sec-5-6g.html
- 1 NERS - Nano Electronic Receiver Switch V2 https://www.hansenhobbies.com/products/onboardacc/ers/nersv2/
- 1 Pololu 1350 (6ch) or 1352(12) https://www.pololu.com/product/1350 https://www.pololu.com/product/1352
- Software for Pololu https://www.pololu.com/file/0J266/maestro-windows-130422.zip
- Pololu manual https://www.pololu.com/docs/0J40
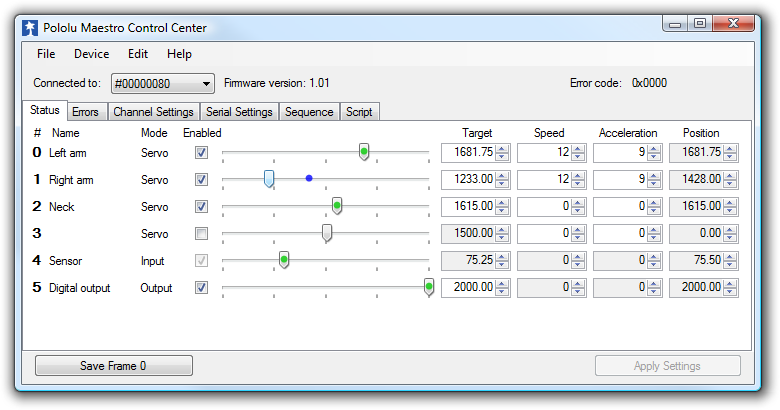
- Settings https://a.pololu-files.com/picture/0J1982.1200.png?d9b55c5d8d48bff96e7cb26b0a85d6e7
Tips
When programming, attach board, connect
servos before mounting and name each channel in the software. Then in the channel settings tab set speed to 20 for head turn
and arm movements and set speed to 30-35 for nodding and forearm movements. Acceleration is set to 60, but can be a bit lower.
Hit Apply settings. All servos will be unticked.
Mount servos in the pilot
without cloths, I run servo leads thru the trousers after have set all servos as described below.
Go
to Status tab. Adjust 1 channel at a time. Move slider until slight servo binding, back a little and copy paste the value
to Channel settings tab for both directions. Hit Apply settings and repeat for all channels.
Test
all channels and fine tune.
Program by moving any number of sliders to desired position and
Save frame. Save as many frames as desired.
Go to Sequence tab and run your sequences. Adjust duration
of each sequence by double clicking the sequence. 300-500 ms for small fast movements, nodding and short hand movements. Other
movements should be set to 1000-2000 ms to give time to complete the full servo run.
By control
marking several frames you can copy paste to get nodding and waving.
I set start frame to 3000 ms
and copy past it as finishing frame also. Prevents undesired movements with binding and damaged servos.
When
ready save a settings file and copy all sequences to script, click run at startup and you have a working animation.
I use the NERS - Nano Electronic Receiver Switch V2 to power the board, thus all servos are
unpowered when the RX channel is inactive. Saving servos again!
Here is a video supplied
by Lasse Hellsten:
https://youtu.be/w4qPKEBoRBo
https://www.youtube.com/watch?v=L7_ADm4pL7c
https://www.youtube.com/watch?v=4_TRE460KSI
https://www.youtube.com/watch?v=w4qPKEBoRBo&t=92s
Contact
Premier Pilots to set up order info@premierpilots.net and any questions.



{kind=link}